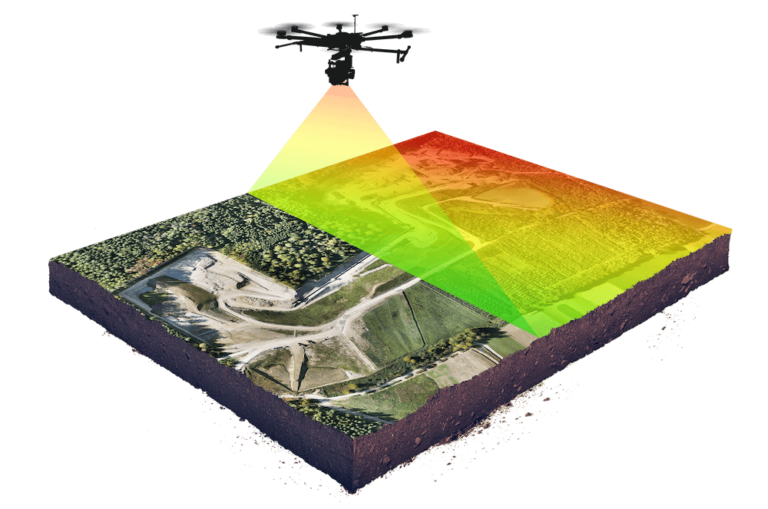
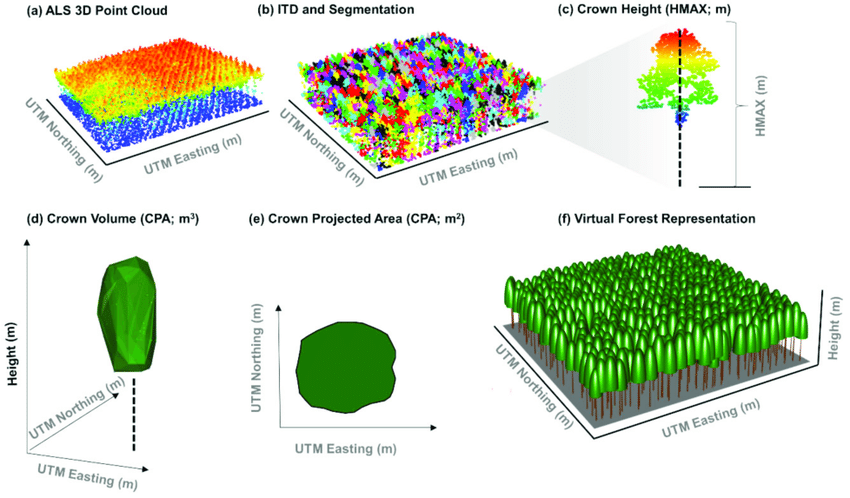
เทรนการสร้างโลกเสมือนจริงเพื่อตอบสนองความเปลี่ยนแปลงของเทคโนโลยีที่เข้ามามีบทบาทในหลากหลายอุตสาหกรรม ซึ่งรวมถึงการท่องเที่ยว โมเดลสามมิติเสมือนจริงของแลนด์มาร์กและโบราณสถานเป็นอีกหนึ่งฟีเจอร์ที่หน้าสนใจซึ่งเป็นการประมวลผลจาก Point Cloud
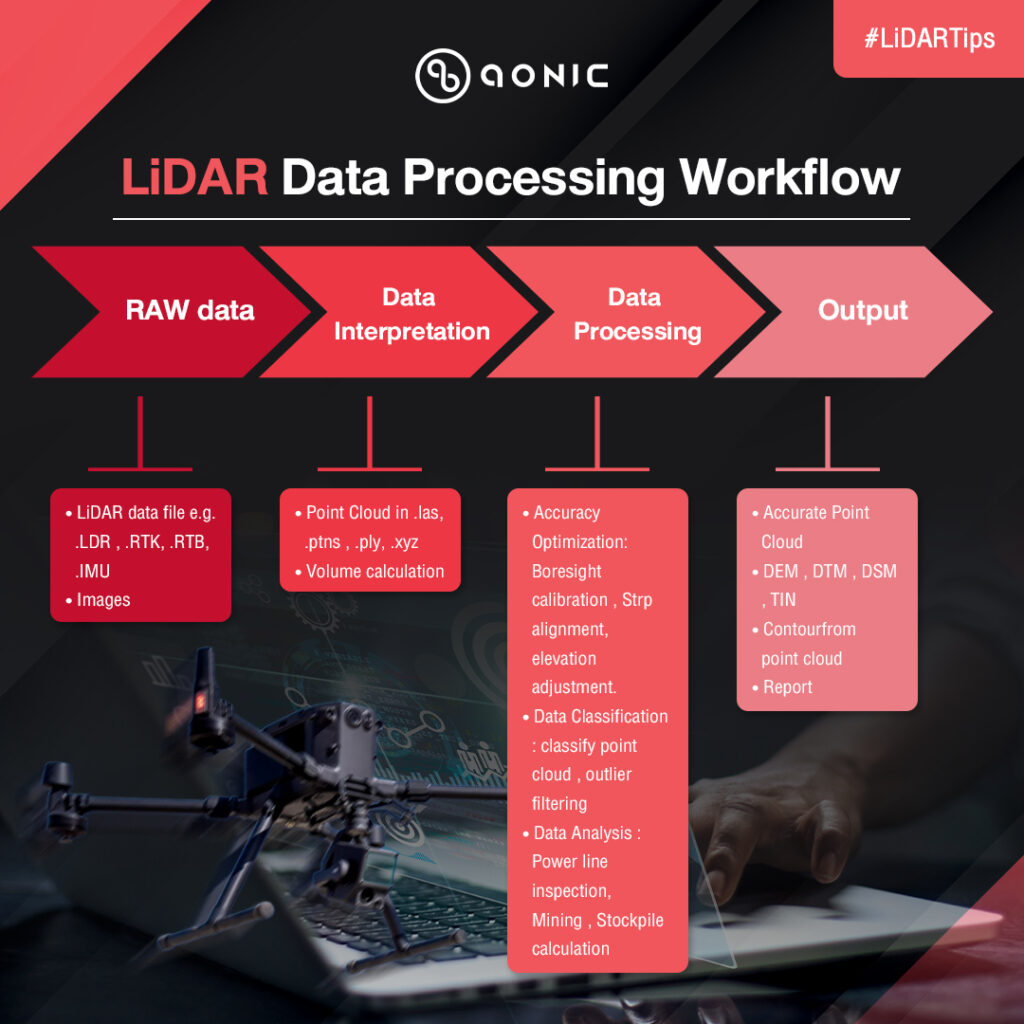
เข้าใจกระบวนการประมวลผล Point Cloud
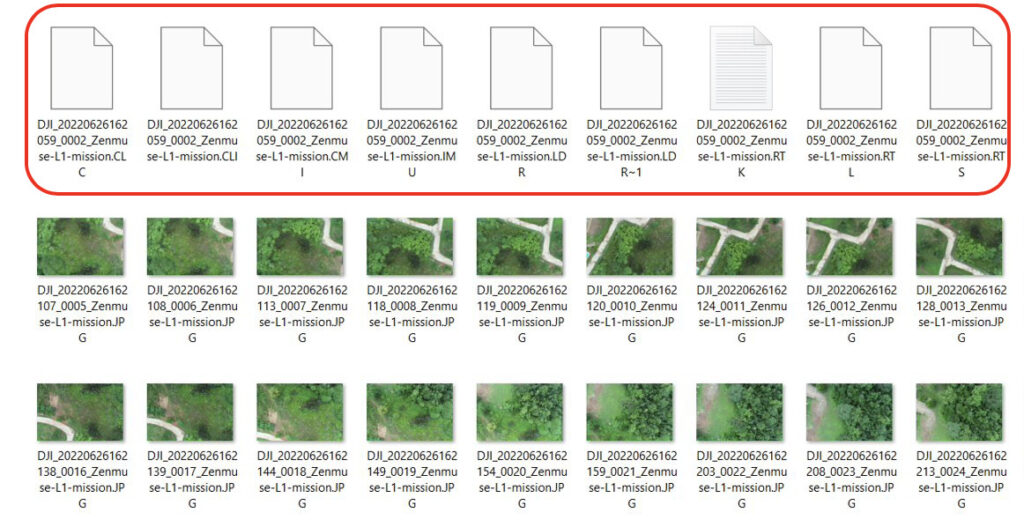
1. การประมวลผล ข้อมูลดิบ Raw Data
Raw Data ส่วนใหญ่จะถูกบันทึกอยู่ใน format เฉพาะของผู้ผลิตหรือแบรนด์ ซึ่งจำเป็นต้องใช้ซอฟท์แวร์เฉพาะของแต่ละแบรนด์ในการแปลงข้อมูลเหล่านี้ให้ออกมาเป็น Point Cloud ที่สามารถนำออกมาใช้งานร่วมกับซอฟท์แวร์อื่นๆได้ โดยข้อมูลดิบอาจมีรูปภาพรวมอยู่ด้วยหาก Sensor นั้นติดตั้งกล้องถ่ายภาพสีร่วมด้วย
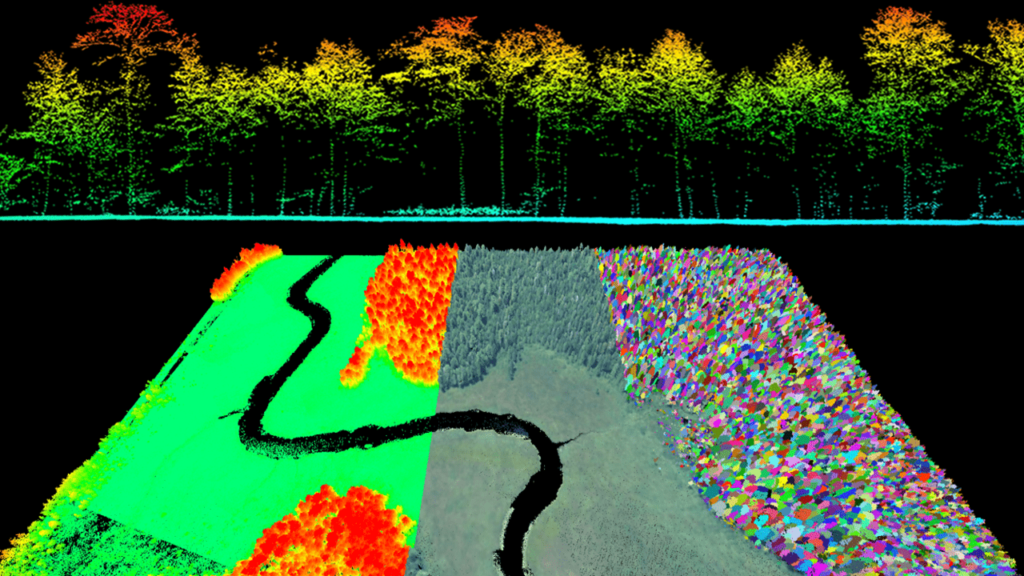
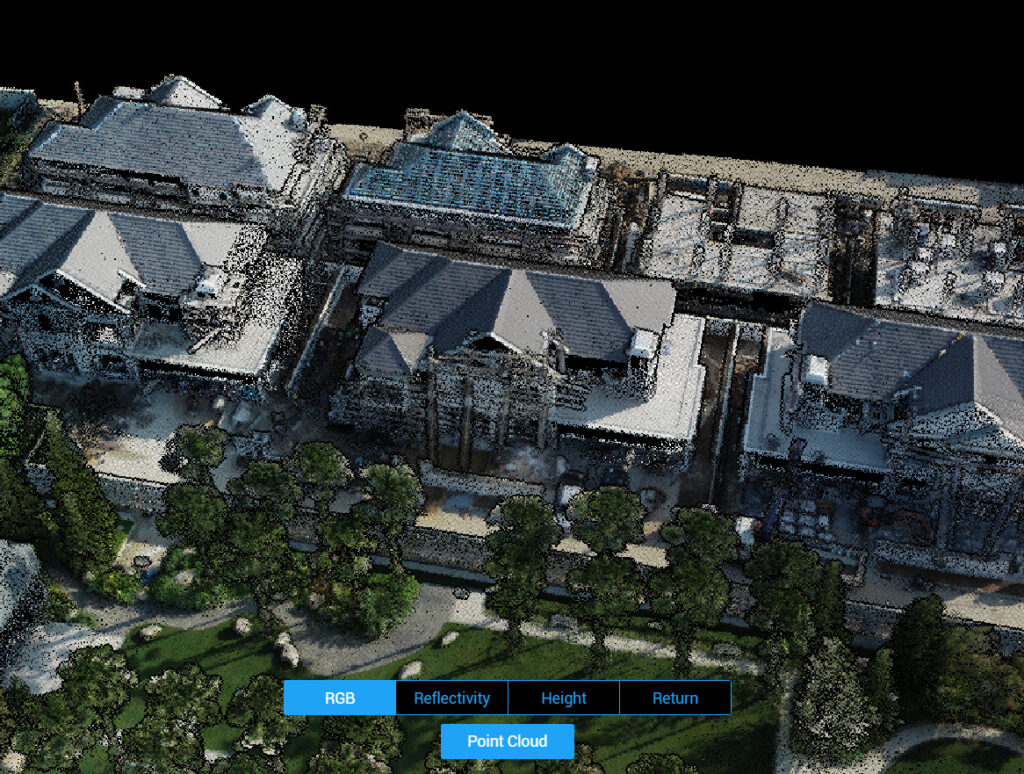
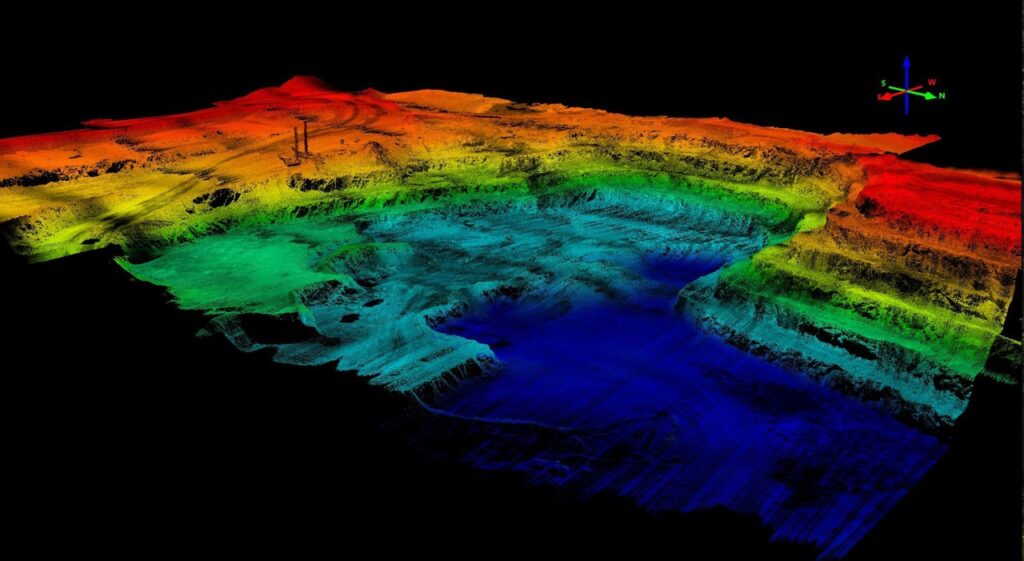
ผลลัพธ์แรก- Point Cloud
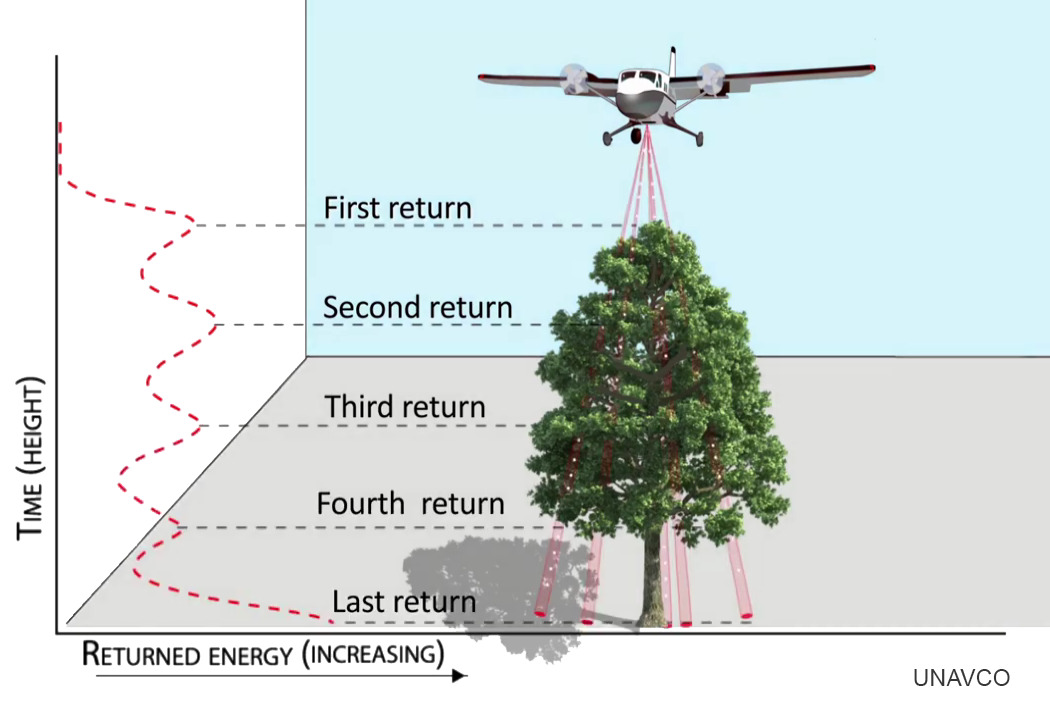
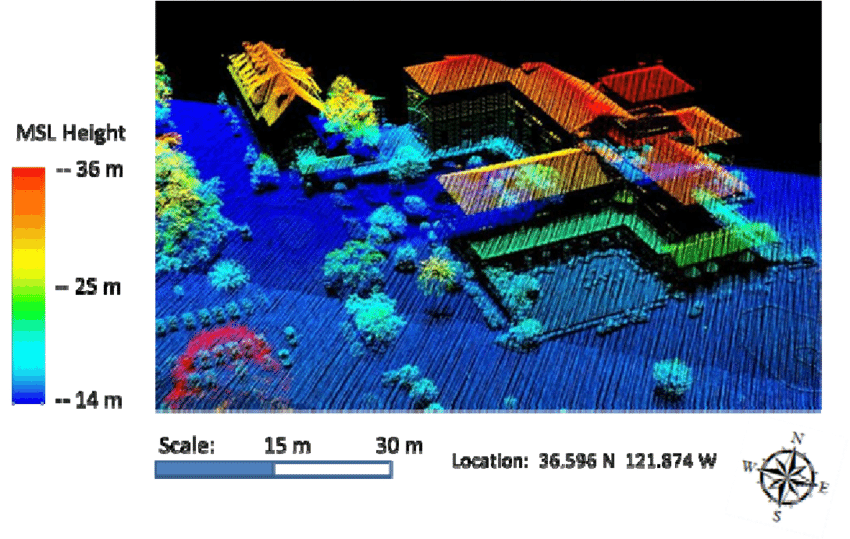
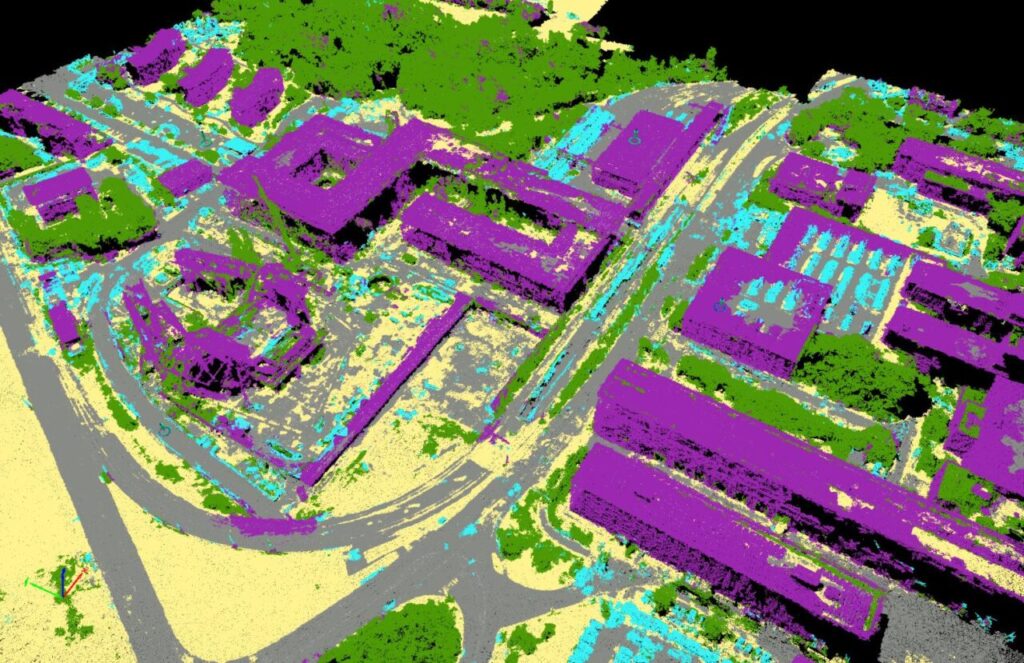
ข้อมูลที่ถูกประมวลผลแปลงจากค่าคลื่นไฟฟ้ามาเป็นค่าพิกัดจุดสามมิติเรียบร้อยแล้วผลลัพธ์แรกที่ได้คือ Point Cloud ซึ่งจะมีการบันทึกค่าการสะท้อนว่าเป็นค่าที่เท่าใด (หากตัว Sensor รองรับการสะท้อนหลายค่า ) ความเข้มของการสะท้อนค่าพิกัดสามมิติของจุดนั้นรวมถึงสีของจุดนั้น ถ้าหาก Sensor นั้นมีกล้องถ่ายภาพร่วมอยู่ด้วย หรือรองรับการทำ colorize point cloud
2.ปรับแก้ความแม่นยำของ Point Cloud
หากต้องการให้ Point Cloud มีความถูกต้องแม่นยำทางต่ำแหน่งมากขึ้นเราสามารถทำการปรับแก้เพิ่มเติมได้ด้วยการทำ Boresight Calibration , Strip alignment , Smooth Point , outliner filtering และ Vertical Adjustment ได้
2.1 Boresight Calibration
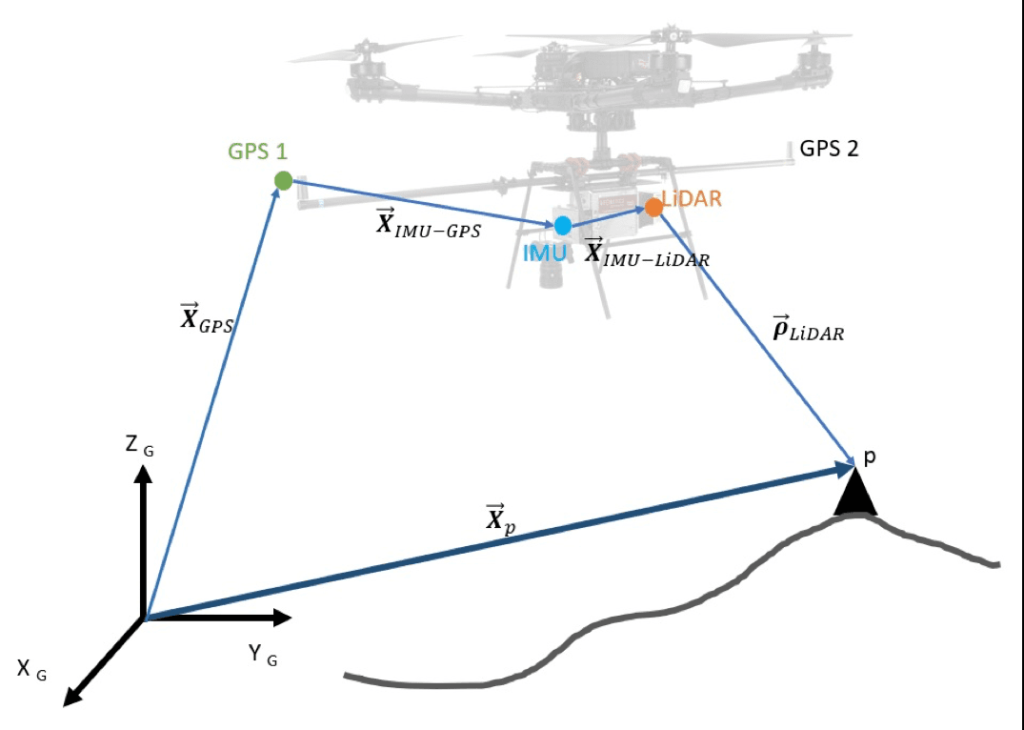
การปรับแก้ค่าคลาดเคลื่อนทางตำแหน่งที่เกิดจากการ shift หรือการเคลื่อนของตำแหน่งระหว่างค่าพิกัด GNSS ที่อยู่บนโดรน ค่าพิกัดทางสามมิติของ IMU และค่า shift ระหว่างตำแหน่งของ IMU และ Sensor โดยการปรับแก้นี้จะเป็นการคำนวณค่าพิกัดของ point Cloud ใหม่อีกครั้งโดยจะช่วยให้ค่าพิกัดของ point cloud มีความถูกต้องทางตำแหน่งมากยิ่งขึ้นโดยเฉพาะค่าพิกัดในทางราบ\
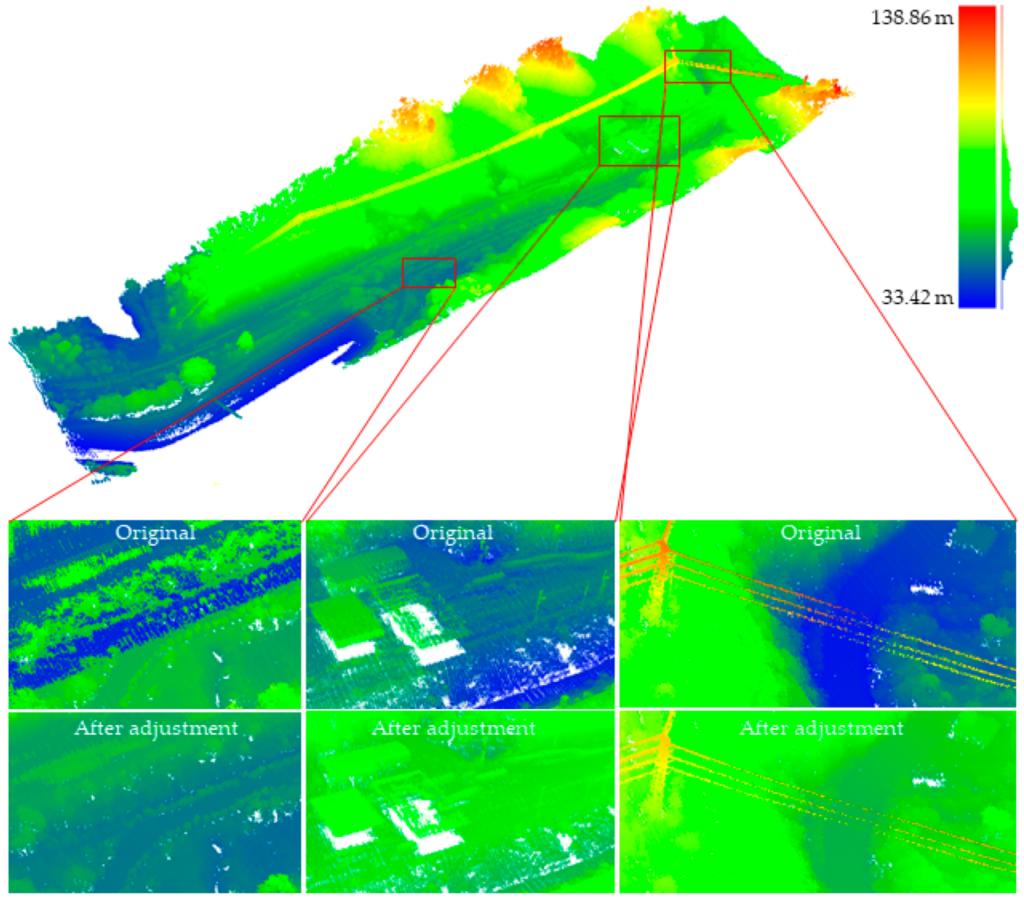
2.2 Strip alignment / Strip adjustment
การปรับแก้ให้ Point Cloud ที่ได้จากการสแกนบน 2 แนวบินที่ติดกันมีการแนบชิดได้สนิทกันมากยิ่งขึ้น โดยจะช่วยให้การเหลื่อมกันระหว่างข้อมูลสองแนวบินมีความเหลื่อมกันน้อยลง ทำให้ข้อมูลมีสภาพตรงความเป็นจริงมากยิ่งขึ้น และส่งผลให้ Point Cloud มีความแม่นยำมากยิ่งขึ้นด้วย
Erleben Sie aufregendes Online-Casino-Spiel bei BetOnRed: Jetzt in Deutschland anmelden! Table Of Contents Die Spannung des Live-Casinos: Wie Sie BetOnRed