All about Aonic
Locate your nearest Aonic Service Centre
Join our team of passionate individuals
Read up on the latest Aonic updates and articles
Point-to-point RTK spraying drone
Most affordable open-field crop spraying drone in Malaysia
Full-fledged mapping software
Android-based flight management & telemetry app
All-in-one solutions to streamline workflows on farms and plantations
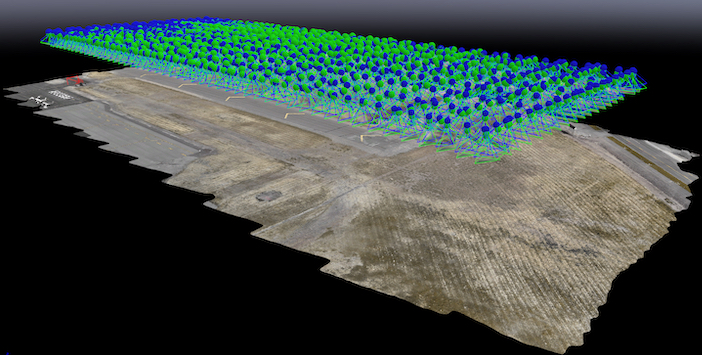
Data acquisition using aerial photogrammetry
Simplify difficult and dangerous tasks at construction sites
Simplify inspection and maintenance of heavy infrastructure
Crisis management with drones
Agriculture drone hire purchase program
Find out more about our service centres across the region
Learn to fly with Aonic
ประสิทธิภาพสูงสุดของการสำรวจและการทำแผนที่ง่ายขึ้นโดยใช้การวัดภาพถ่ายทางอากาศพร้อมความแม่นยำระดับเซนติเมตร
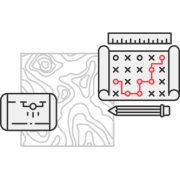
Using drones for surveying achieves the same level of topographic accuracy as traditional survey methods, while reducing time and manpower costs significantly
โดรน คิเนมาติกแบบเรียลไทม์ (RTK) บันทึกข้อมูลการทำแผนที่ด้วยความแม่นยำระดับเซนติเมตร ทำให้สามารถดำเนินการได้อย่างแม่นยำสูง เช่น การฉีดพ่นเฉพาะจุดเพื่อการเกษตรและการสร้างแบบจำลองภูมิประเทศแบบดิจิทัล
ด้วย เทคโนโลยี จลนศาสตร์แบบเรียลไทม์ (RTK) ทำให้โดรนสามารถบันทึกข้อมูลภูมิประเทศที่หลากหลายด้วยความแม่นยำระดับเซนติเมตร เพื่อวิเคราะห์ภูมิประเทศอย่างละเอียดในรูปแบบต่างๆ (ออร์โธโมซาอิก, พอยต์คลาวด์, DTM, DSM, เส้นชั้นความสูง ฯลฯ)
โดรนทำงานบนระบบนำทางอัตโนมัติโดยแสดงข้อมูลคุณภาพเดียวกันแต่ใช้ทรัพยากรเพียงเศษเสี้ยวของวิธีการแบบเดิม
โดรนสามารถสำรวจภูมิประเทศที่ท้าทายได้อย่างง่ายดาย ซึ่งแตกต่างจากวิธีการภาคพื้นดินแบบดั้งเดิม ทำให้มั่นใจได้ว่าการส่งข้อมูลจะสม่ำเสมอและราบรื่นในทุกสภาพแวดล้อม
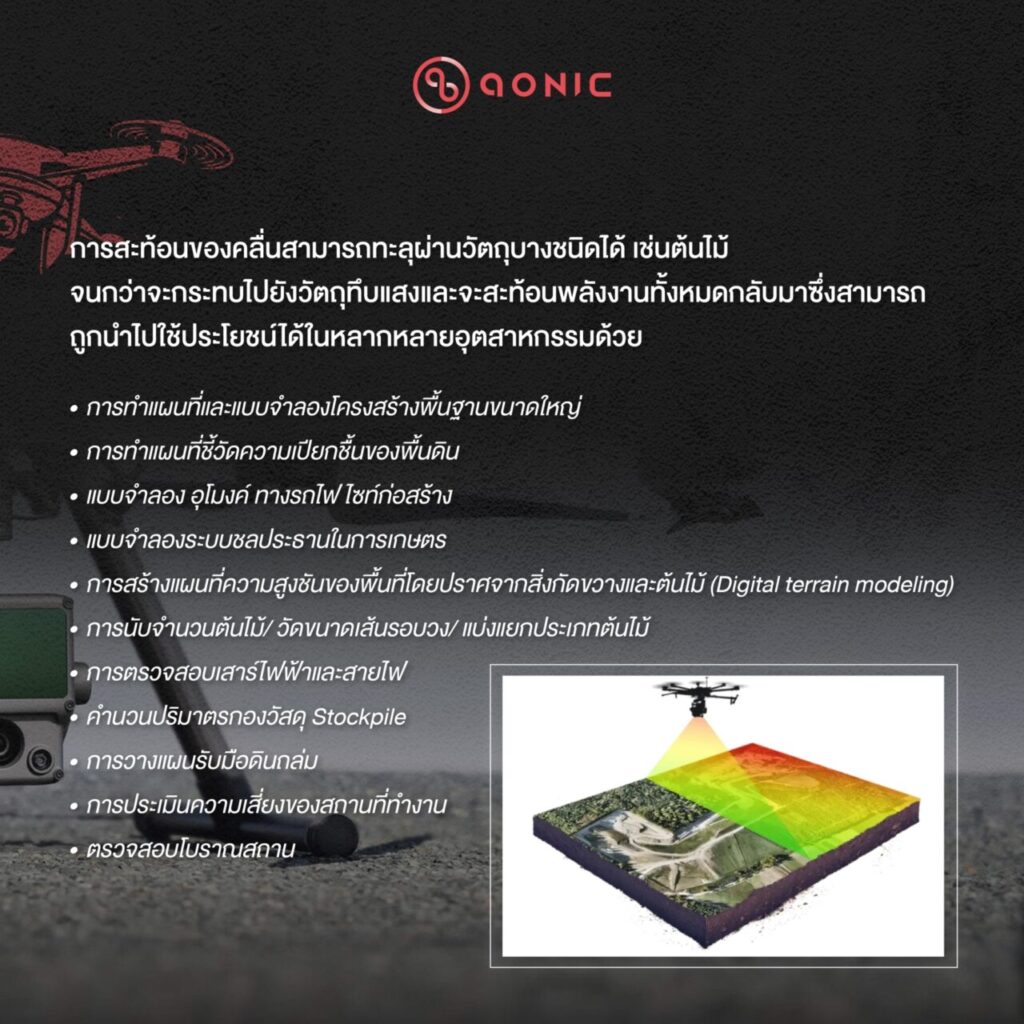
ตัว LiDAR นั้นจัดเป็น “Active Sensor” กล่าวคือสามกำเนิดหลังงานด้วยตัวเองโดยไม่จำเป็นที่จะต้องพึ่งพาคลื่นแสงจากดวงอาทิตย์ในการช่วยสะท้อนค่าพลังงานกลับมายัง Sensor ทำให้การใช้งานนั้นครอบคลุมถึงพื้นที่ที่แสงอาทิตย์เข้าไปไม่ถึง และช่วงเวลากลางคืน
เนื่องจากคุณสมบัติของวัตุบางชนิดที่สะท้อนแสงบางส่วนและปล่อยให้แสงทะลุผ่านบางส่วน เช่นในพื้นที่ที่เป็นพืชปกคลุม อาทิ ในสวนยางหรือป่าชุก การส่งคลื่นแสงออกไป 1 ครั้งยังสามารถมีค่าการสะท้อนกลับมาที่มากกว่า 1 ทำให้เรามีข้อมูลที่มากขึ้นและช่วยให้สามารถวิเคราะห์ข้อมูลได้ถูกต้องและแม่นยำ โดยเฉพาะในงานวิเคราะห์พื้นผิวดินในพื้นที่ป่า ซึ่งคลื่นแสงสามารถทะลุใบไม้บางส่วนได้ จากยอดไม้ไปต่อยังช่วงกลางต้นและสุดท้ายกระทบกับวัตถุทึบแสงเช่นลำต้นหรือผิวดิน ลักษณะเหล่านี้จะทำให้เราสามารถมีข้อมูลผิวดินและข้อมูลลำต้นข้องต้นไม้ได้ ซึ่งข้อมูลเหล่านี้จะช่วยให้การทำงานเป็นไปได้ง่ายกว่าในอดีตมาก โดยการรับค่าคุณสมบัติกลับมานั้นเรียกว่า “Multiple returns”
อ่านบทความเชิงลึกเกี่ยวกับ LIDAR: LiDAR ในโดรนสำรวจและวิธีการประมวล Point Cloud
อ่านบทความเชิงลึกเกี่ยวกับ Phtogrammetry: หลักการ Photogrammetry ด้วยโดรนสำรวจ
Marvic 3 Enterprise มาตรฐานใหม่ของโดรนเชิงพาณิชย์ขนาดเล็ก ด้วยชัตเตอร์กลไก กล้องที่สามารถซูมได้ถึง 56 เท่า และ โมดูล RTK สำหรับเพิ่มความแม่นยำระดับเซ็นติเมตร Mavic 3E ยกระดับความสามารถของโดรนไปอีกขั้น
Have questions? Our drone experts are here to help