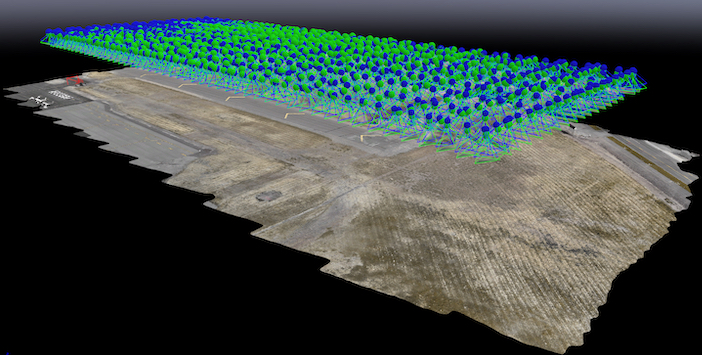
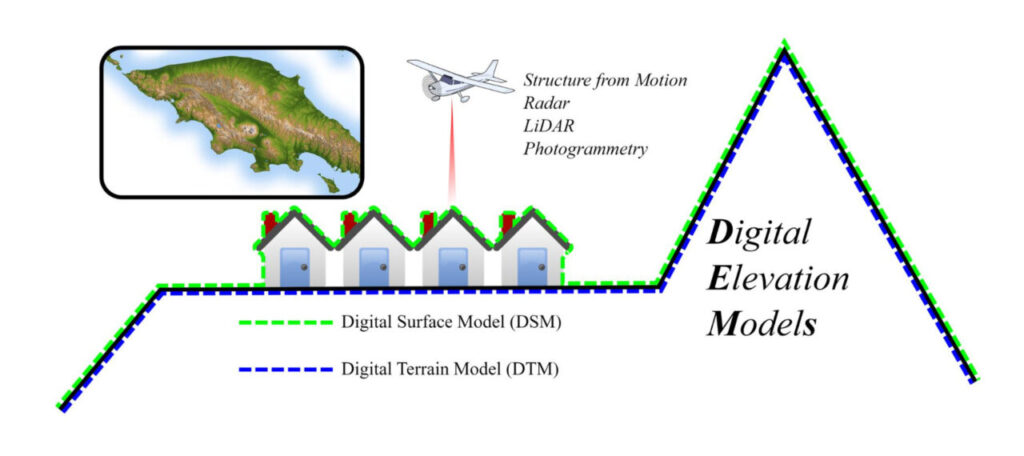
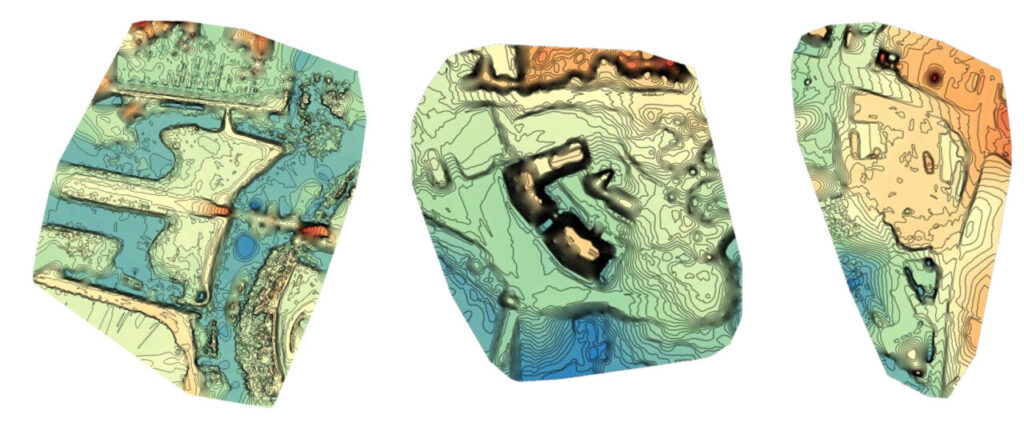
ข้อมูลระดับความสูงใน รูปแบบดิจิทัล ที่มีการเก็บค่าความสูงในลักษณะตารางกริดเป็นพื้นผิวต่อเนื่อง ซึ่งแบบจําลองระดับสูงมีความ แตกต่างของการวัดที่ตําแหน่งของจุดระดับสูง 2 ลักษณะ คือ Digital Surface Model (DSM) และ Digital Terrain Model (DTM)
2.1 แบบจำลองพื้นผิว (DSM : Digital Surface Model)
Erleben Sie aufregendes Online-Casino-Spiel bei BetOnRed: Jetzt in Deutschland anmelden! Table Of Contents Die Spannung des Live-Casinos: Wie Sie BetOnRed